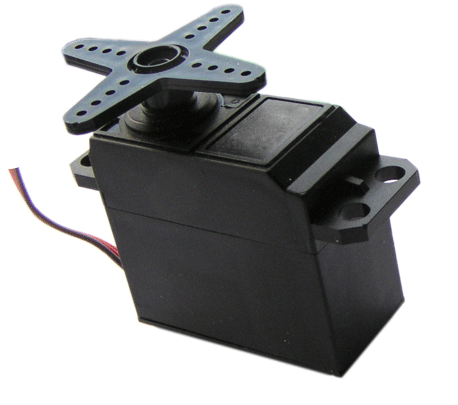
ز جمله موتور های پر کاربرد در عرصه رباتیک و صنعت، سروو موتور ها هستند. این موتور ها در کاربرد هایی که نیاز به چرخش با زاویه مشخص وجود دارد، استفاده می شوند
avatrobo.ir
راه اندازی سروو موتور بدون نیاز به PWM!!!
در این پروژه می خواهیم بدون استفاده از توانایی pwm میکرو، یک سروو موتور را کنترل کنیم!!!
همان طور که در تصاویر زیر مشاهده می کنید، سیگنالی که موتور سروو را به حرکت در می آورد دارای یک دوره تناوب ثابت می باشد که با تغییر مدت زمان یک بودن(یک منطقی)، می توان زاویه آن را تنظیم کرد.
در این پروژه مدت زمان تناوب را ۲۰ میلی ثانیه(فرکانس ۵۰ هرتز) در نظر گرفته ایم.حال با دستور های set و reset و گذاشتن دستور wait بین این دستور ها مدت زمان یک بودن را با تغییر مدت زمان دستور wait، تغییر می دهیم.
PHP:
set portb.1
waitus 1000
reset portb.1
waitus 19000
خط اول، پین یک از پورت B را یک می کند.
خط دوم، این پین را به مدت زمان ۱۰۰۰ میکرو ثانیه(۱ میلی ثانیه) در همان حالت(یک منطقی) نگه می دارد.
خط سوم، این پین را صفر می کند.
خط چهارم، این پین را در همان حالت خط قبل(صفر منطقی) به مدت زمان ۱۹۰۰۰ میکرو ثانیه(۱۹ میلی ثانیه) نگه می دارد.
به این صورت با تغییر دو عدد جلوی خط دوم و چهارم می توان پهنای پالس(مدت زمان یک بودن) را تغییر داد.مجموع این دو عدد باید ۲۰۰۰۰ میکرو ثانیه(۲۰ میلی ثانیه) باشد.
من یه نمونه سروو موتور sg5010 رو با هزار بدبختی راه انداخنتم . آخه اینها هرکدوم یه جوری را ه اندازی می شوند . با کد زیر حد پایین و بالای سروو مشخص شده است .و سروو بین 0 تا 180 درجه
با سلام من می خواهم سرو موتوری رو با AVR و Bascom-AVR راه اندازی کنم و تاکنون با سرو موتور کار نکرده ام اگر ممکن است در مورد سرو موتور ها و نحوه اتصال به میکرو و نحوه راه اندازی و کنترل آن ها توسط میکرو و سیم های خروجی سرو موتور را توضیح دهید ، خیلی خیلی ممنون می شوم ، از بین سرو موتور هایی که...
www.eca.ir
سالک: کد کمی مغشوش است.
اون اولش باید این باشه فکر کنم:
تریب جان من نمیخوام ازون روش استفاده کنم توضیح دادم چجوری میخوام اصلا سروو رو فراموش کن میخوام با بیسکام یک برنامه بنویسم که فرکانس 50 هرتز مربعی تولید کنه و بشه توش نیم سیکل مثبت رو از 1 تا 2 میلی ثا
Servo Motors are preferred in angular motion applications like robotic arms. We can easily interface a hobby servo motor with Atmega32 Microcontroller.
electrosome.com
کد بالا برای من اجرا شد ولی وقتی سیم ثابت بود از کار می افتاد یعنی وقتی سیم را قطع و وصل می کردی بین میکروکنترلر و سرو موتور کار میکرد ولی وقتی سیم ثابت بود سروو موتور نمی چرخید.
پورت سی است دقت کنید. به بقیه پورت ها وصل نکنید. منمظورم اینه کد برای پورت سی نوشته شده و مسلما روی اون پایه های میکروکنترلر جواب می دهد.