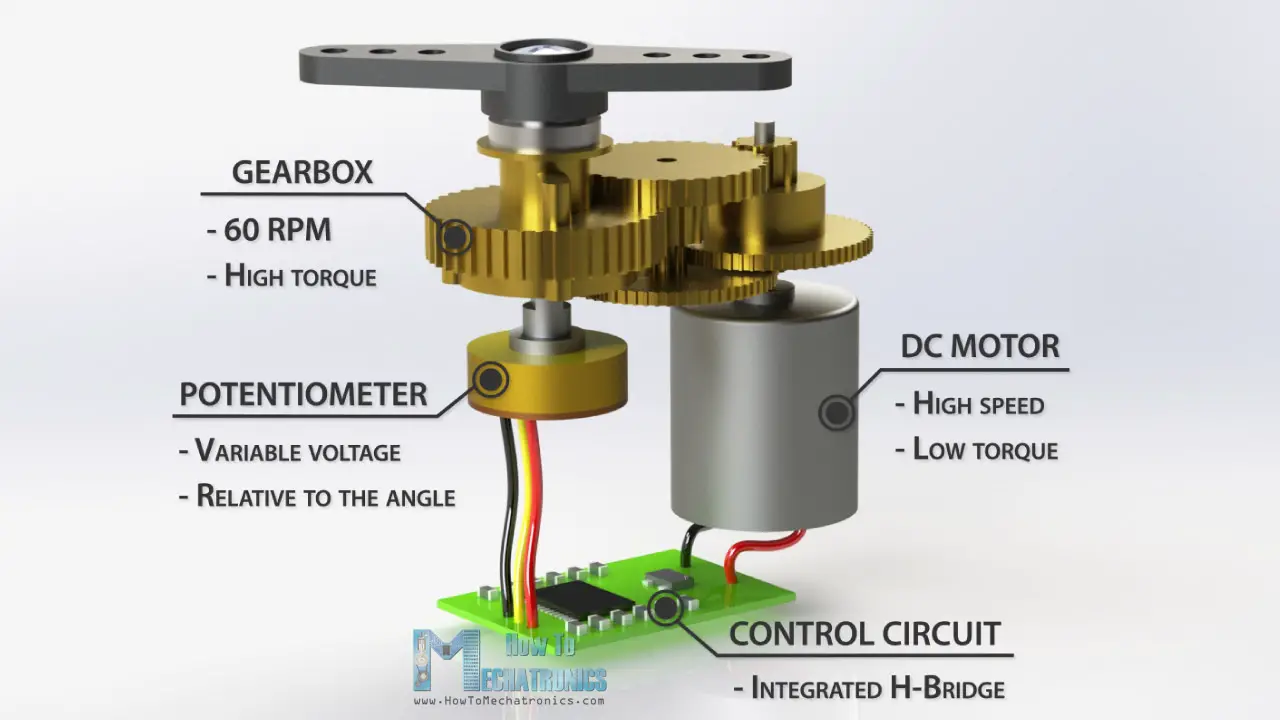
Explore the world of servo motors and Arduino with this comprehensive guide. Learn the basics of servo motor control, delve into the specifics of the Tower Pro SG90 servo motor, and follow a step-by-step tutorial to interface it with an Arduino. Discover servo motor types, understand the working...
#include <Servo.h>
Servo myservo; // create servo object to control a servo
int potpin = 0; // analog pin used to connect the potentiometer
int val; // variable to read the value from the analog pin
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
val = map(val, 0, 1023, 0, 180); // scale it to use it with the servo (value between 0 and 180)
myservo.write(val); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
}














 Discover the Top 10 Free AI Fitness Apps for Personalized Training
Discover the Top 10 Free AI Fitness Apps for Personalized Training